







")

The ISM3D is a highly accurate underwater Attitude & Heading Reference System.
The ISM3D utilises high grade MEMS based Accelerometers, Angular Rate Gyroscopes and Magnetometers all of which feed into an advanced fusion engine driven by a dual core micro-processor.
The unit provides Heading to ±1° of local Magnetic North with Pitch and Roll to ±0.07° accuracy.
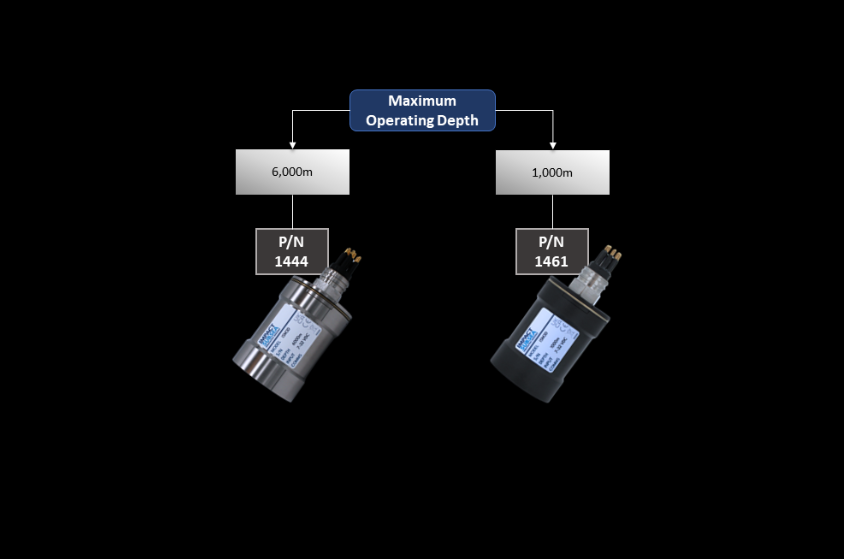
Provided in a Titanium housing, depth rated to 6,000 meters, with a length of 65mm – the ISM3D sets a new standard in size, durability and capability.
Also available in an Acetal Housing depth rated to 1,000 meters or as an OEM system.
Heading to ±1° of local Magnetic North.
The Heading is derived from Micro-Electrical-Mechanical-System (MEMS) based technology.
Within the ISM3D there are MEMS based Gyros, Accelerometers & Magnetometers. The outputs from each of these MEMS devices are fused together using an advanced fusion algorithm. The output from this is highly stable Heading, Pitch & Roll.
The Heading is highly resilient against temporary magnetic interferes. This is aided by a soft and hard iron calibration feature once the unit has been installed on the ROV, AUV or other underwater platform.
In areas where a large amount of steel of other magnetic disturber is present, the unit can be set to operate using the Angular Rate Gyroscopes and Accelerometers, without input from the Magnetometer. The low drift rate of the advanced MEMS based Gyroscopes enables navigation to be conducted in areas where previously only a fibre or ring laser diode based heading sensor would suffice.
Pitch & Roll to ±0.07° Accuracy.
The Pitch and Roll reading is derived from Micro-Electrical-Mechanical-System (MEMS) based technology.
Within the ISM3D there are three MEMS based Gyros, Accelerometers & Magnetometers. The outputs from each of these MEMS devices are fused together, providing highly stable Heading, Pitch & Roll.
Provides Heading to ±1° of local Magnetic North with Pitch and Roll to ±0.07° accuracy.
The high update rate (up to 250Hz) is highly applicable for use with auto heading and vehicle stabilisation systems.
For optimal performance, a hard and soft iron calibration can be performed on the unit once installed on the ROV or AUV. This ensures that a consistently accurate heading is provided at all times.
In areas where a large amount of steel of other magnetic disturber is present, the unit can be set to operate using the Angular Rate Gyroscopes and Accerometers, without input from the Magnetometer. The low drift rate of the advanced MEMS based Gyroscopes enables navigation to be conducted in areas where previously only a fibre or ring laser diode based heading sensor would suffice.
Heading to ±1° of local Magnetic North with Pitch and Roll to ±0.07° accuracy.
Provides a clear understanding of equipment orientation and attitude.
Heading to ±1° of local Magnetic North with Pitch and Roll to ±0.07° accuracy.
Ideal for underwater survey work.
Heading to ±1° of local Magnetic North with Pitch and Roll to ±0.07° accuracy.
Ideal for monitoring the motion of any underwater vehicle or platform.
The Impact Subsea Academy is a help center and knowledge base. It has been set up for you to be able to search for articles on anything from your first steps to the most advanced features.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}