")






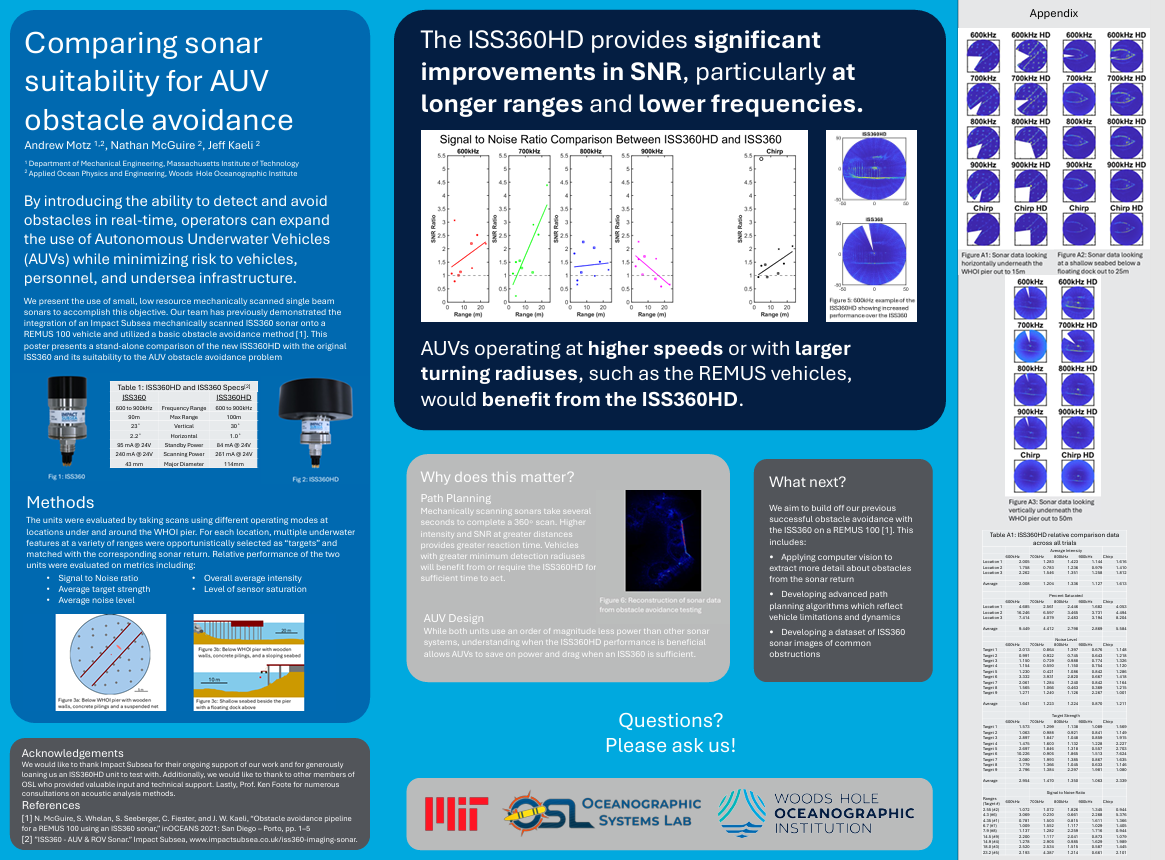
Impact Subsea, today shared the results of a study comparing the performance of its ISS360 and ISS360HD imaging sonars for Autonomous Underwater Vehicle (AUV) obstacle avoidance.
The study, conducted by researchers at the Massachusetts Institute of Technology (MIT) and Woods Hole Oceanographic Institute, was presented at the IEEE AUV Symposium in Boston.
Led by Andrew Motz, Nathan McGuire and Jeff Kaeli, the study evaluated the two sonar systems under various underwater conditions, including different ranges and target types. The researchers compared the sonars’ signal-to-noise ratio (SNR), average target strength, average noise level, overall average intensity and level of sensor saturation.
The results were clear: the ISS360HD demonstrated superior performance in all categories, particularly in terms of SNR, which is crucial for detecting obstacles at longer ranges and in challenging underwater environments.
This improved performance is due to the increased angular resolution of the ISS360HD, which enables the ISS360HD to capture more detailed and accurate information about the surrounding environment.
Ben Grant, Managing Director, Impact Subsea said;
“With the ISS360HD sonar we were keen to provide high resolution sonar imagery to all classes of underwater ROV and AUV. We are pleased to review the exciting work of MIT and WHOI and their thoughts on the ISS360HD benefits for future AUV integrations.”
The study’s findings have important implications for the marine technology industry, as AUVs are increasingly being used for a wide range of applications, including scientific research, offshore exploration and environmental monitoring.
The ISS360HD’s superior obstacle avoidance capabilities can help to ensure the safety and reliability of AUV operations while also improving their efficiency and effectiveness.
Comparing Sonar Suitability for AUV Obstacle Avoidance Poster